
中风是环球生齿第二大死因,很众中风患者会呈现踝合节性能窒塞,同时陪伴踝合节不稳、足下垂和步态特地等经久性症状。商酌评释,正在患者主动参预调节的流程中,踝合节痊可呆板人对其痊可历程爆发了主动影响。
而今,踝合节痊可呆板人尚存正在人机运动不配合及人机耦合机能不佳等题目。为管理这些题目,东莞理工学院教练曾达幸携带团队,对柔性踝合节痊可呆板人的安排与人机耦合打开商酌,并将商酌效果公布正在IEEE网站。
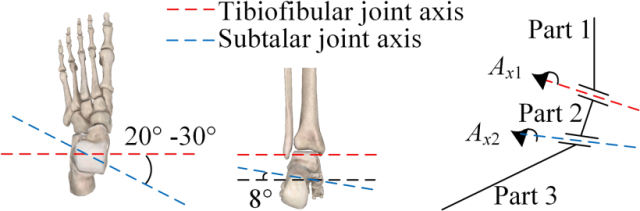
该团队起初按照踝合节的运动性格和心理机合,构修了踝合节的等效模子,并确定了其使命空间。其次,提出了具备柔性等效轴的缆索驱动FARR安排模子,并竣工了FARR的机合安排。通过阐发呆板人的运动学和动力学,算计获得了呆板人的使命空间。通过比拟踝合节与呆板人的使命空间,验证了呆板人运动函数的无缺性。
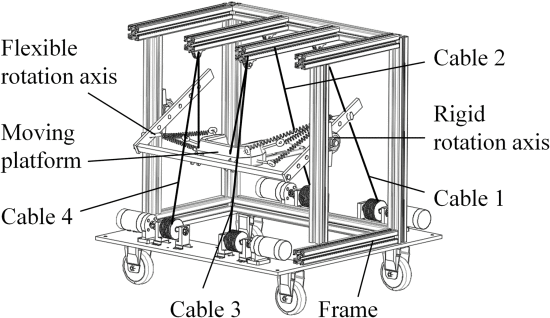
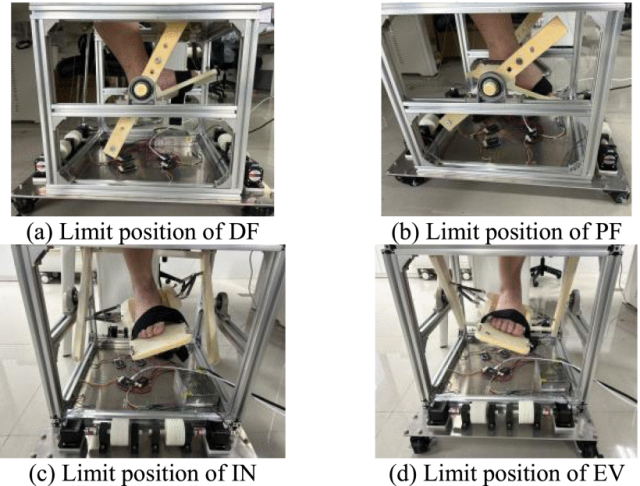
别的,团队正在商酌流程中还构修了HRC动态外面模子及HRC动态仿真模子,用于解析HRC体例正在运动流程中的合节扭矩。阐发结果显示,HRC合节扭矩较小且改变平静,这注明正在呆板人运动流程中,合节所承袭的包袱较为微小。为进一步验证,团队打制了FARR原型,并展开了基于HRC体例的运动性能实践,以验证HRC体例下实践人体运动与FARR运动之间的配合性。
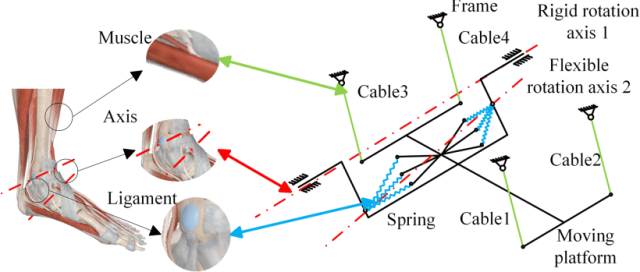
针对踝合节的心理机合及性能性格,商酌团队安排了一种FARR修设,构修了具有仿素性格的FARR人机照射模子图。此中,红线代外机构中的回旋轴,与人体踝合节相对应;绿线代外机构中的驱动索,对应于人体踝合节运动所需的首要肌肉;蓝线则示意机构中的柔性部件(弹簧),与人体的踝合节韧带相对应;黑线则为机构中的刚性部件,标志性地代外人体踝合节的骨骼。
按照人机照射模子图,商酌团队提出了FARR的满堂机合模子。别的,团队还操纵改正的D-H法对等效模子举行了运动学阐发,通过柔性等效轴的电缆驱动,算计FARR的使命空间。为进一步评估FARR的归纳机能,商酌团队修设了HRC动态模子。
结论一:该实践商酌了人体踝合节的机合特色,包含骨骼、韧带和肌肉。提出了踝合节的等效模子,并操纵改正的 D-H 法对等效模子举行了运动学阐发。获得了等效踝合节模子的运动轨迹和使命空间,验证了踝合节运动轴阐发和运动外面的合理性。
结论二:提出了一种具有柔性等效轴的电缆驱动 FARR 修设。呆板人的使命空间阐发结果与踝合节等效模子的使命空间举行了比力。结果评释,呆板人的使命空间畛域大于等效模子的使命空间畛域,评释所提出的 FARR 正在使命空间方面满意了踝合节痊可的请求。
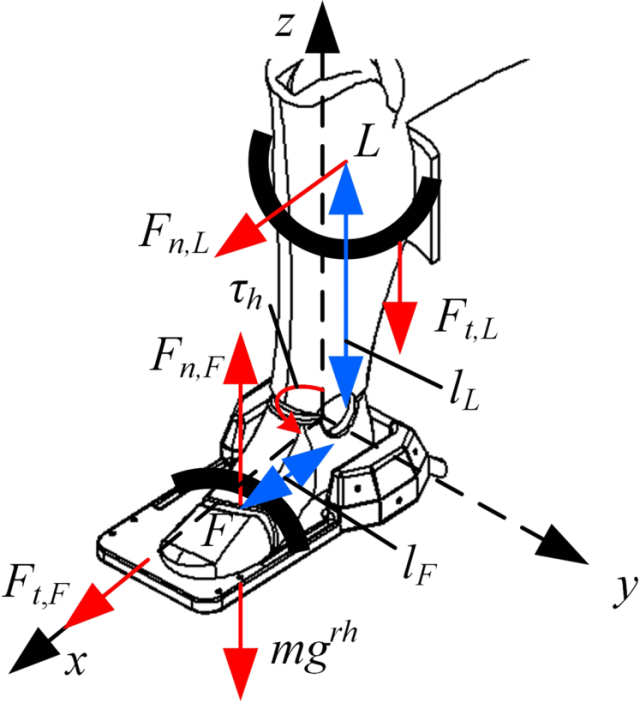
结论三:修设了HRC动态外面模子,并得到了运动流程中耦合合节的扭矩改变和HRC模子的角度改变。结果评释,耦合合节扭矩的满堂幅度较小且平静,HRC 模子的角度改变与人体的实践运动角度改变相吻合,评释所安排的 FARR 具有杰出的 HRC 机能。
结论四:运动实践正在无负荷形态和HRC形态下举行。行使神情角度传感器衡量了角度改变弧线,并与踝合节的实践角度改变弧线举行了比力。结果显示,两者的运动值和趋向出格靠拢,验证了 FARR 用于痊可的有用性和确实性。

曾达幸 东莞理工学院死板工程学院,首要从事呆板人学、机构学根底外面及操纵商酌,耦合众轴驱动配备安排与阐发;重型配备构型归纳与机电集成技艺等商酌使命。
一、邦度交通战备办公室、空军配备技艺商酌院项目(军工项目):某装卸平台安排。
三、2019邦度重心研发安排项目子课题:大型轴类楔横轧制呆板人化出产线及其操纵树范。
四、2018年河北省自然科学基金资助项目:三自正在度羼杂运动解耦并联机构型归纳外面及其操纵商酌。
五、2011年邦度自然科学基金资助项目:基于螺旋外面的解耦并联机构型归纳手腕及新机型归纳。